Do you know Bob?
Contains:
Bob on full suspension mountain bikes can be a problem for many riders, it happens for three reasons:
1. The rider bouncing up and down on the seat due to a bad pedal stroke.
2. Compression (squat) or extension (jack) from the chain tension.
3. Compression (squat) or extension (jack) from the rider and bike accelerating forwards in pulses.
Number one is up to the rider, time spent on full suspension bikes helps to correct a bad pedal stroke.
Numbers two and three are up to the design of the bike. Ideally we want a bike which won't Bob through either chain tension or acceleration.
Torque:
Torque is twisting force, torque on the rear suspension will cause it to compress or extend. Eliminating torque due to chain tension is very easy, place the chainline through the pivot and it has no leverage on the suspension.
All bike suspension designs contain linkages of some description. Four bar bikes need link designs require the use of some geometry tools to predict, where monopivots and faux bars are quite easy to predict under chain tension and acceleration. URT's are quarantined and discussed below.
As mentioned earlier, placing the rear axle on a floating link means it doesn't pivot about either of the frame pivots. Instead the floating rear link arcs about a geometric point called the "instant centre" or IC which represents the two links connecting it to the main frame
The rear axle is a point on the rear link, which on most four bars in most cases has a path consisting of one or more circular arcs. I have called the centre of curvature for each part of the arc the "Effective Pivot" (EP).
To find the EP we need to use a geometric point called the Instant Centre (IC) (ICR in Peters diagrams). The IC for a linkage is found by drawing lines through the piovots of the upper and lower links and extending them until they cross. The point that they cross is the IC (for that linkage position).
But we want to find the path of one point on that link (the rear axle), not the whole link.
If we draw a line through the rear axle and IC of a linkage then we have a line which is tangential (90 degrees) to the axle path.
If we now move the linkage a small amount and draw in the new IC and IC/axle line we can find the point where the tangential lines cross. This point is the centre of curvature (CC) or Effective Pivot of the rear axle for that range of motion. Peter has marked it "VL" in his diagram.
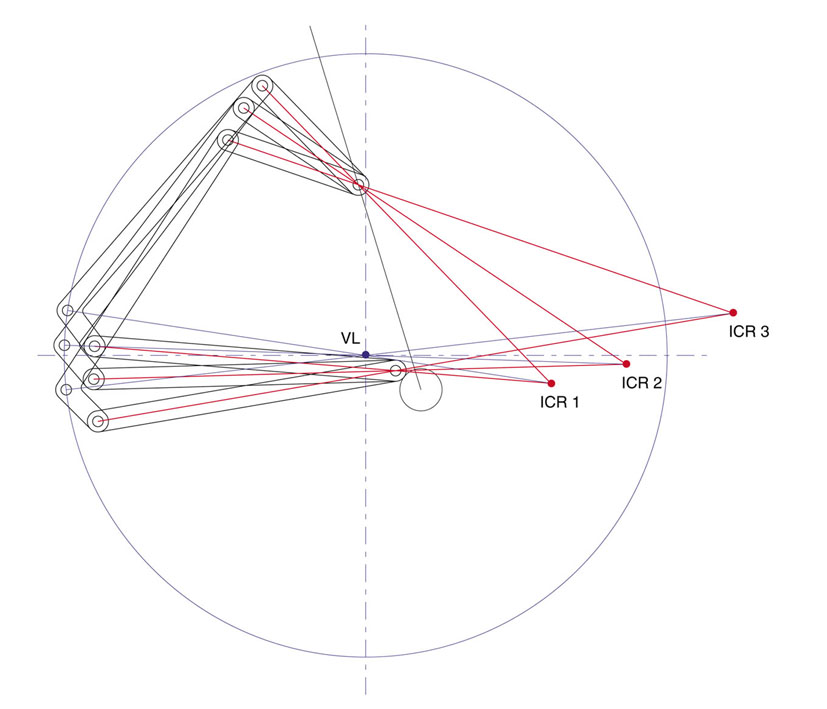 "Four bar rear suspension showing stationary effective pivot. (marked VL)" Image courtesy of Peter Ejvinsson. |
You can see in the diagrams above the EP moves very little (almost stationary) when the upper and lower links are moving over centre. Yet it moves significantly when the linkage nears it's limits of motion, where the upper link comes close to in line with the rear link.
The Effective Pivot is the point which a simple swingarm (monopivot) design could be used and give the same axle path and pedalling performance.
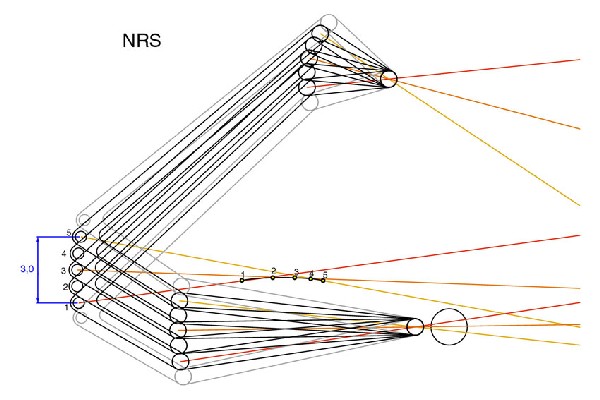 "NRS Style rear suspension showing the Effective Pivot moving as the upper link nears it's limits of motion." Image courtesy of Peter Ejvinsson. |
This effective pivot is the point which the chain line must pass through to give no torque on the suspension. This can occur in more than one gear combination. However this is not critical, a small deviation will result in only a small effect
Horst link bikes also have an advantage under braking (well the good Horst links do), see the Brake Effects page for more.
On a seatstay linkage bike the rear axle path is a perfect curve about the main pivot. Exactly the same behaviour as a monopivot.
As such everything above in the Horst Link analysis applies regarding chain tension and pivot placement, just change Effective pivot for Main Pivot and forget about the IC.
The fixed main pivot is where the problems lie for faux bar and monopivot designers. The ideal pivot position for chain tension is hard to acheive because of the front derailleur, most manufacturers go lower and make a bike with a small mush factor in all gears.
But this just adds to the large amount of squat (compression) that faux bars and monopivots suffer from under acceleration.
Many of the more popular monopivot bikes (Marin FRS, SC Heckler) use a main pivot position which is higher and more forward than ideal. This causes the chain tension to have an extension effect which to differing degrees cancels the squat from acceleration to provide a bike that climbs and accelerates well but at the price of pedal kickback.
On a URT the chain tension is internal to the swingarm and has no effect, the external force acting on the suspension is the force applied to the pedals.
To cause no torque on the swingarm under pedalling the main pivot has to be vertically in line with the pedals where the majority of the weight is applied, at the 3 o'clock position.
But on a URT you can't win. When you apply weight to the pedals you must remove it from the seat. This causes the suspension to extend.
Therefore the ideal pivot placement is slightly furthur back from the front pedal.
Furthur considerations include the seat to pedal distance changing as the suspension moves, making a smooth pedal stroke impossible and eliminating bob also impossible.
URT's accelerate in the same manner as faux bars and monopivots.
Acceleration effects are exactly the same as climbing effects.
Because our pedal strokes are not completely smooth our bikes accelerate forwards in pulses in time with our pedal strokes.
The forces involved are the traction force at the rear tire contact patch and the opposing (but equal) acceleration reaction force through the centre of mass of you and your bike.
The opposing forces (action and reaction) causes a rearward moment(torque) which can be seen as a rearward weight shift (your front wheel lightens, the weight on the rear wheel increases).
|
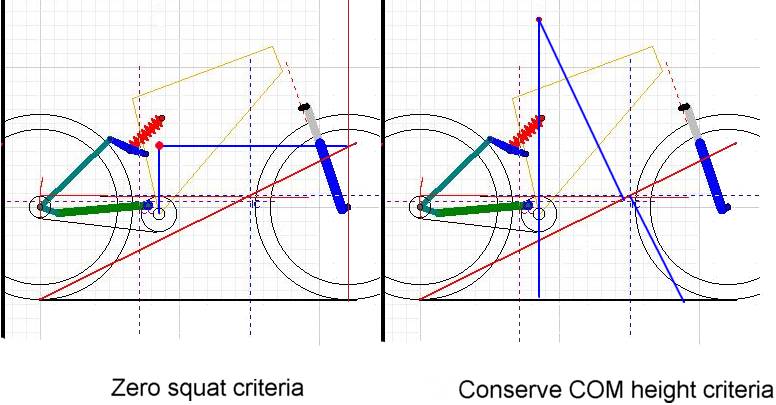
The above diagrams show where the centre of mass (the red dot) has to be to acheive two outcomes.
On the left the rear suspension will not squat at all under acceleration if the COM is placed as shown.
On the right the rear squats the same amount as the front extends, the result is the COM staying at the same height.
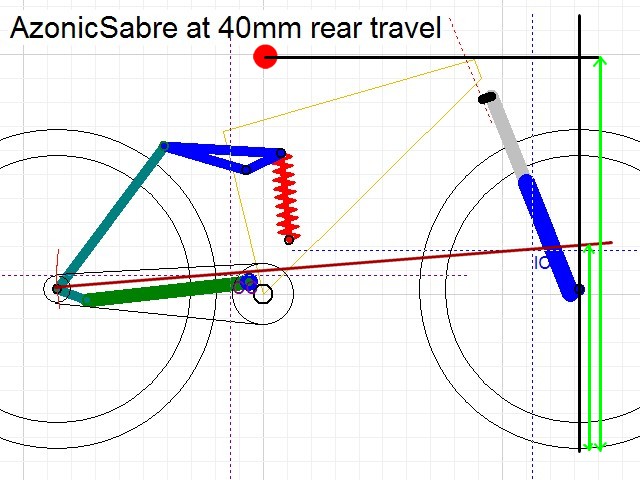
The bike shown is my previous FS (a modified 2000 specialized bighit with 150mm of travel) at 40mm compression to show the geometry with a rider on board. As you can see the diagram on the right places the COM where we'd expect to find it. This predicts that my bike will suffer from a little squat under acceleration and climbing, but the rider will stay at the same height.
Real world testing shows this to be the case. With the use of a 24" rear wheel and a further linkage modification I managed to make the bike behave like the diagram on the right. The acceleration and climbing behaviour was excellent, but the resulting geometry didn't suit the trail riding which the bike previously excelled at.
So, how do we quantify the differences between four bars and monopivots?
The answer is pretty easy, using the same tools we used above, we can draw up moment diagrams for different bikes and compare them.
Below is an Azonic Sabre (four bar, horst link) and below that is a Santa Cruz Heckler medium-high mononpivot.
 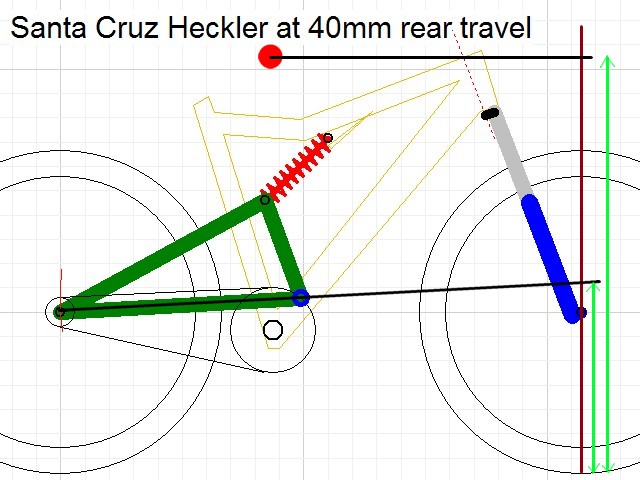 |
The green lines you can see are the squat and anti-squat components. The long one is the weight trying to compress the suspension, the short one is the suspension geometry providing upthrust. The difference between the two is the result experienced by the suspension.
In this particular example, the four bar experiences a small amount less squat than the monopivot. The results will vary from bike to bike, but in general this is to be expected, good four bars squat less than a medium-high monopivot and squat much less than faux bars or low monopivots.
When riding less squat translates to a crisper pedalling bike which doesn't sit as low on climbs and generally bobs less.
 "My old bike, 97 Specialized GC AIM Comp", a horst link macpherson strut." |